Distance measuring method is changed from structured light pattern(Kinect v1) to
ToF(Time of Flight)(Kinect v2) as mentioned in previous post, several changes
can be detected in depth image of new Kinect.
First of all, there is no interference between multiple Kinects.
Previous version of Kinect use structured light pattern for depth measuring, so
if another kinect device is running simultaneously, holes are detected in overlapping area as below figure. White blobs in below depth image shows interference which has unknown depth value, and it is called as hole.
But, there is no interference between multiple devices using Kinect v2.
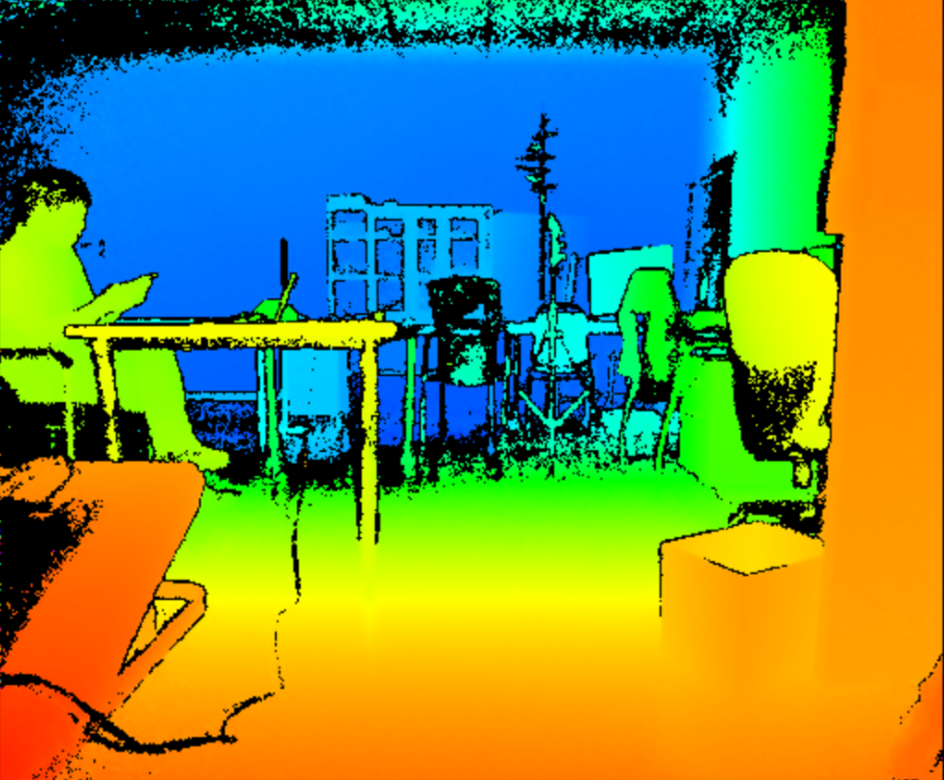
First image is the depth image when only single kinect is processing, and second one is the depth image when multiple devices are running.
You can see there is no difference between two depth image, so we can use multiple kinect w/o interference in Kinect v2.
You can also see the edge of depth image remains black, and I think that phenomena is the property of tof.
ToF(Time of Flight)(Kinect v2) as mentioned in previous post, several changes
can be detected in depth image of new Kinect.
First of all, there is no interference between multiple Kinects.
Previous version of Kinect use structured light pattern for depth measuring, so
if another kinect device is running simultaneously, holes are detected in overlapping area as below figure. White blobs in below depth image shows interference which has unknown depth value, and it is called as hole.
 |
| <Holes in depth image> |
First image is the depth image when only single kinect is processing, and second one is the depth image when multiple devices are running.
 |
| <Single Sensor> |
 |
| <Multiple Sensor> |
You can see there is no difference between two depth image, so we can use multiple kinect w/o interference in Kinect v2.
You can also see the edge of depth image remains black, and I think that phenomena is the property of tof.
Another big change in Kinect v2 is infrared property.
In old Kinect, Kinect IR camera can sense out door and cannot measures depth in outdoor. But, using Kinect v2, it can operate in outdoor.

As above figure, with the ir sensor of each Kinect, we can see outdoor with Kinect v1 but cannot with Kinect v2. I think Kinect v2 uses there own frequency, so it cannot sense outdoor but with there own frequency, it can measure the depth in outdoor as below figure.

It is quite important change in new Kinect, and with longer working range in Kinect v2(up to 8m), various applications can be developed in outside.
This is all for second preview of Kinect version 2.
Next post will coming soon with more informative data.
Thank you for reading.
Song, Wanbin
M.S. Candidate
Laboratory of Digital Image Processing
Department of Electronic and Electrical Engineering
Dongguk Univ. Seoul, Korea
Homepage : http://dip.dongguk.edu
E-mail : wbsong@dongguk.edu
me.wbsong@gmail.com
------------------------------------------------------------------
